1. Регламент соревнований
Роботы одного вида соревнуются между собой в подгруппах, после чего происходит финал между победителями.
Требования к роботу
- Габариты (ширина x длина) на момент старта 150х150 мм, высота не регламентируется.
- Сразу после старта робот может единовременно увеличить размеры до 200х200 мм.
- Колеса робота не должны быть чрезмерно липкими (стандартный тест: робот, поставленный на лист бумаги А4 не должен при поднятии поднять этот лист за собой).
Требования к рингу для поединка
- Круглый черный ринг диаметром 77 см, высотой 16-25 мм.
- Белый бордюр шириной 20-25 мм.
- В центре ринга расположены 2 коричневые линии длиной 10 см и шириной 5 мм.
- Участники должны помещать своих роботов за этими линиями или их продолжением.
Условия состязаний
- Цель поединка – вытолкнуть робота-соперника за пределы ринга.
- Перед поединком роботы устанавливаются на разных половинах ринга за ограничительными линиями строго друг напротив друга.
- По команде судьи участники включают питание роботов. Роботы должны двигаться друг навстречу другу до соприкосновения и не разъединяться до конца поединка.
- Робот проигрывает, если коснулся поверхности за пределами ринга или одновременно потерял соприкосновение с соперником и возможность перемещаться (например, перевернулся).
- По прошествии 1 минуты побеждает робот, оказавшийся ближе к центру ринга.
- Если участник коснулся робота после старта до соответствующей команды судьи, он автоматически проигрывает (!).
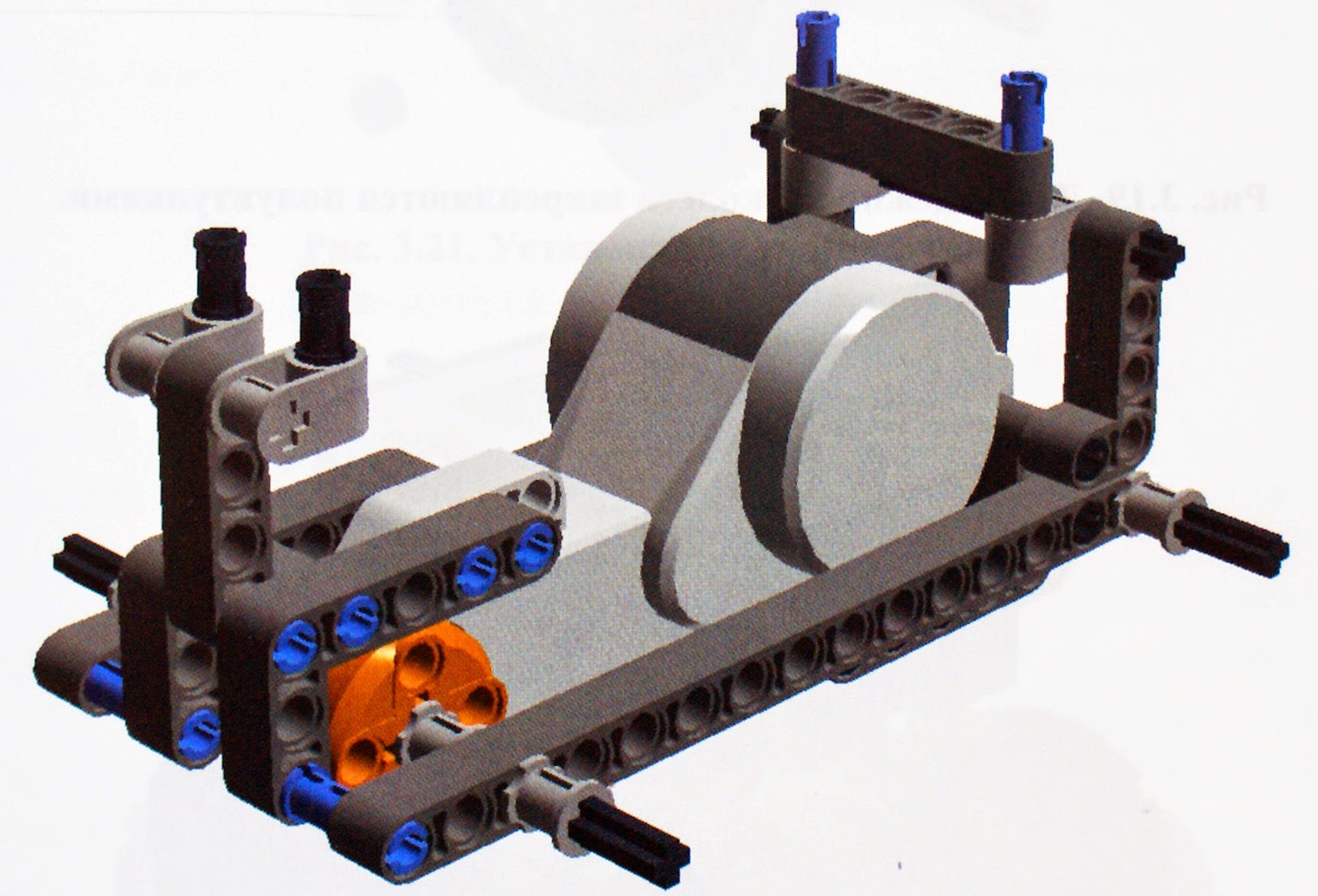
2. Понижающая передача и полный привод
Понижающая передача позволит роботу ехать медленно, но двигать максимально возможный груз. Понижающая передача 3:1:
Для того чтобы колеса не пробуксовывали, надо поставить полный привод.
Установка дополнительной оси с упором для фиксации шестеренок:
Полный привод робота-тягача на 2 модуля длиннее обычной тележки:
Установка балки, фиксирующей шестеренки:
Робот-тягач с полным приводом готов:
Бампер можно использовать, чтобы оторвать противника от пола. Серую 3-модульную ось заменим на черную 6-модульную:
Изогнутые балки - основа для бампера:
Бампер не касается поверхности:
4. Результаты соревнований
В первой подгруппе к участию в соревнованиях были поданы заявки от следующих команд:
- Atom: Оспельников Алексей и Шаповалов Никита
- СПОРТКАР: Шабанов Александр и Герасимук Ярослав
- ЗМЕЯ: Горшков Влад и Тихомиров Глеб
- НАПОЛЕОН: Попов Георгий
- ВЗРЫВНАЯ ВОЛНА: Васильев Илья и Меркутов Юра
Итоговая таблица соревнований выглядит следующим образом:
Таким образом, I-II место поделили команды
Atom и
НАПОЛЕОН (100 баллов). Этим ребятам предоставляется право участию в открытых зимних соревнованиях СПб по робототехнике. III-IV место - 80 баллов. Команды, не дошедшие до соревнований по 10 баллов.
Во второй подгруппе были заявлены следующие команды:
- ОГОНЬ: Лексунов Дмитрий
- РОБОКРАФТ: Дьяконов Александр
- МОТОБОТ: Дьяконов Николай
- МЕСТЬ: Матушкин Михаил и Павлов Александр
- ФЕНИКС: Никитин Кирилл и Матюшев Кирилл
- СУПЕРМЕН: Клопский Егор
- ЧЕМПИОН: Зверев Артем и гость
Вне конкурса в этом соревновании участвовал робот УРА (Ерохов Антон).
Набор для участия в открытых зимних соревнованиях СПб по робототехнике предоставляется победителям (100 баллов) команде ФЕНИКС. II место 90 баллов команда ЧЕМПИОН, III место 80 баллов команда МЕСТЬ. По 10 баллов зачисляется роботам, не принявшим участие в соревнованиях.
Судьба двух оставшихся наборов пока решается.
Несколько фотографий для отчета