Требования, предъявляемые к этому механизму:
- четыре колеса, плотно сцепленные с поверхностью земли, попарно соединены осями, колеса должны вращаться;
- отсутствие других частей конструкции, соприкасающихся с поверхностью;
- наличие электромотора, приводящего в движение передние и/или задние колеса;
- наличие источника питания для электромотора и программы управления им;
- по команде оператора тележка должна двигаться вперед или назад и транспортировать груз.
1. Одномоторная тележка
Первая тележка не должна уметь поворачивать, поэтому ограничимся одним мотором с передним приводом. Первая 12-модульная ось будет ведущей.
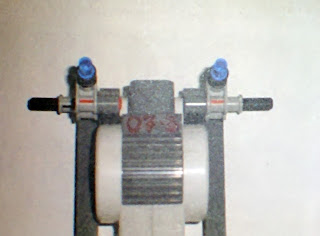
 Обе оси закрепляются на отдельную балку:
Обе оси закрепляются на отдельную балку:




 Три из пяти шестеренок паразитные, но польза от них есть. Передаточное отношение будет 1:1. Нечетное количество паразитных шестеренок позволяет сохранить направление. Малая шестерня в центре не занимает пространство для преодоления бугристых препятствий.
Три из пяти шестеренок паразитные, но польза от них есть. Передаточное отношение будет 1:1. Нечетное количество паразитных шестеренок позволяет сохранить направление. Малая шестерня в центре не занимает пространство для преодоления бугристых препятствий.


Колеса крепятся так, чтобы не было трения с балками:

Тележка поедет под управлением через второй мотор:

Вращая управляющий мотор, добьемся движения тележки:

2. Полноприводная тележка
Наиболее эффективное расположение шестеренок для полноприводной тележки:
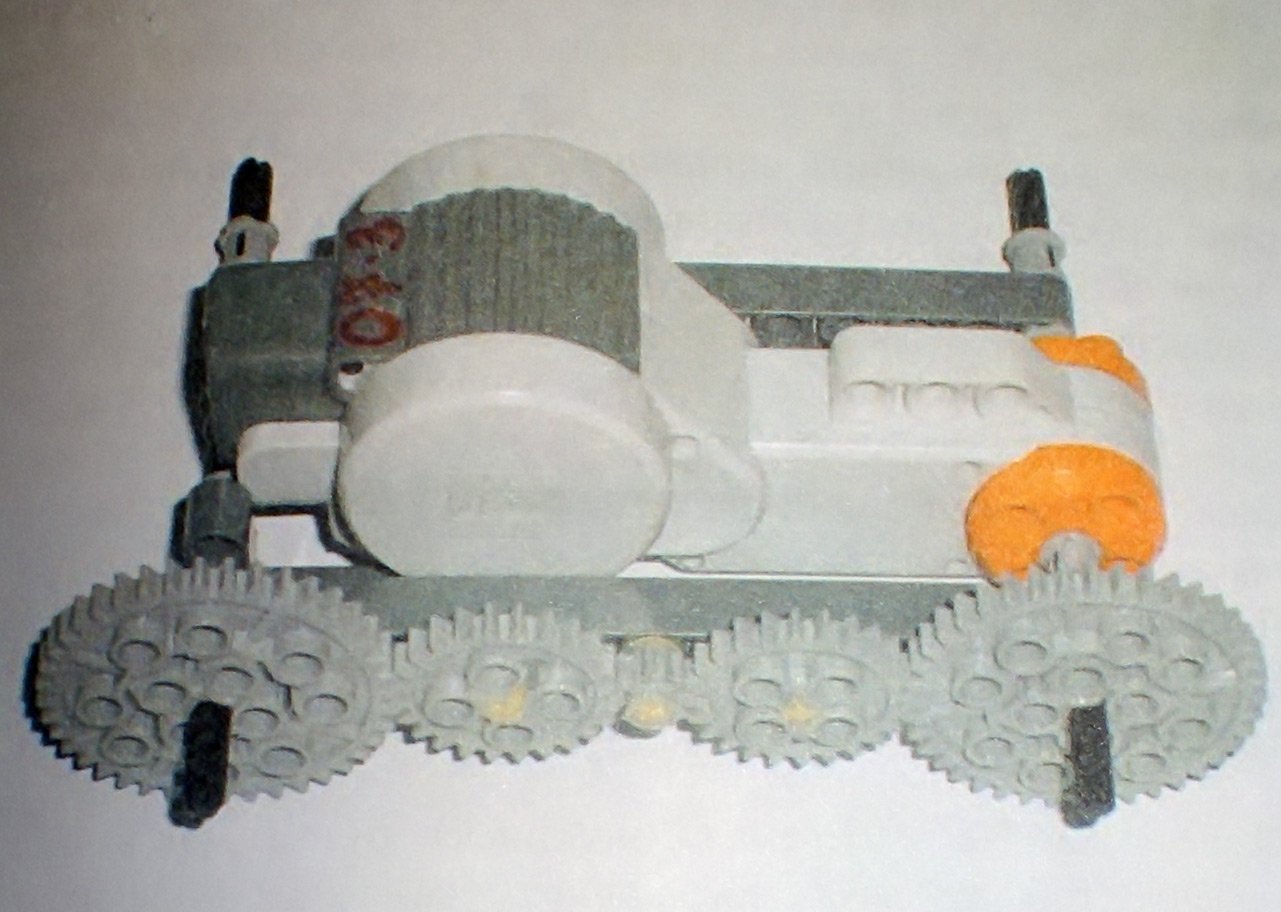

Если колеса насажены слишком глубоко, может возникнуть трение с соседними шестеренками, которые вращаются в противоположную строну. Этого можно избежать: заменить каждую 12-модульную ось двумя 8-модульными, состыковав их в оранжевом моторном цилиндре, или просто удлинив оси специальными втулками.
Итак, прототип "вездеходика" с ручным управлением готов.
Разместим на корпусе тележки блок NXT. Переднее крепление для NXT на базе одномоторной тележки.
 Трехмодульные штифты скрепляют сразу три детали:
Трехмодульные штифты скрепляют сразу три детали:
 Для заднего крепления придется отсоединить боковые балки:
Для заднего крепления придется отсоединить боковые балки:
 С добавленными уголками боковые балки встают на место:
С добавленными уголками боковые балки встают на место:
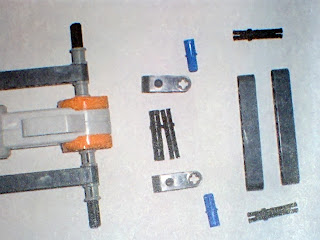
 Набор штифтов, мини-осей и фиксаторов для заднего крепления NXT:
Набор штифтов, мини-осей и фиксаторов для заднего крепления NXT:
 Можно сказать, создали новую деталь:
Можно сказать, создали новую деталь:
 Закрепили на угловые балки:
Закрепили на угловые балки:
 Установка шестеренок и колес уже знакома по предыдущей модели, поэтому повторять не станем.
Установка шестеренок и колес уже знакома по предыдущей модели, поэтому повторять не станем.
Остается прикрепить контролер. Для этого требуется еще одна доработка конструкции: необходимо поднять крепление на один модуль, чтобы оставить пространство для аккумулятора. Заодно можно добавить угловые балки для последующей установки бампера.
 Угловые балки можно использовать для установки бампера:
Угловые балки можно использовать для установки бампера:
 Готовая тележка (автор Юра Парадовский):
Готовая тележка (автор Юра Парадовский):
Фототочет






3. Тележка с автономным управлением







Остается прикрепить контролер. Для этого требуется еще одна доработка конструкции: необходимо поднять крепление на один модуль, чтобы оставить пространство для аккумулятора. Заодно можно добавить угловые балки для последующей установки бампера.


 |  |  |











































{kind=link}